

Создан оригами-робот для захвата объектов
Сегодня роботизированные манипуляторы широко применяются во многих отраслях промышленности, но повторить природный шедевр в виде пальцев на руке человека они все еще не в силах.
Механические пальцы могут быть нежными, но не способными поднять тяжелые предметы, либо цепкими, но крошащими хрупкие вещи. Совместить одно и другое ― цепкость и аккуратность ― взялись инженеры из лаборатории CSAIL Массачусетского технологического института.
Захват напоминает полураскрытый цветок, а сама идея выросла из оригами под названием «Волшебный шар» или «Яйцо дракона». Захват состоит из обрезиненного сегментированного скелета, который может раскрываться и складываться. Во время захвата предмета воздух откачивается из оболочки, и захват смыкается на предмете. Сила трения и вакуум позволяют поднять предмет в 100 раз тяжелее захвата и при этом не сломать его.
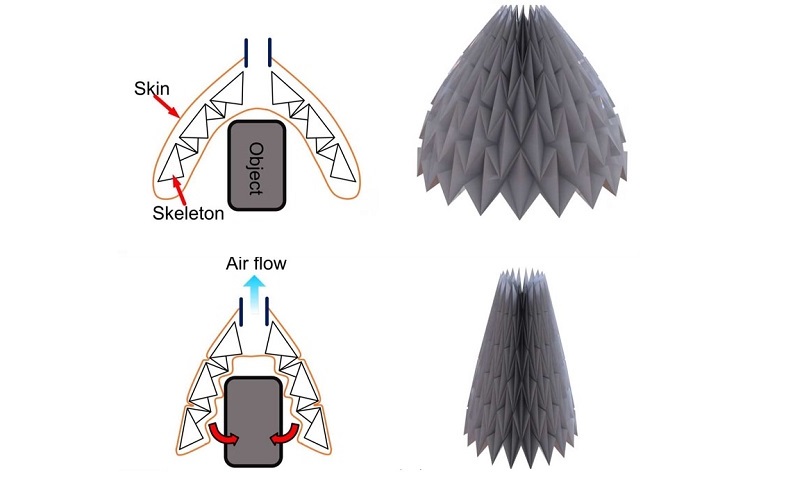
Опыты показали, что захват позволяет перемещать объекты с произвольной формой. Единственное ограничение ― в поперечнике место захвата предмета должно быть на 30% меньше зоны раскрытия манипулятора.
В предложенных MIT манипуляторах остро нуждаются компании, подобные Amazon. Роботизированные перемещение и упаковка предметов с разной формой могли бы помочь значительно сэкономить.
источник: 3DNews
 0
0
 0
0
 0
0
 0
0
 0
0


