

Автономный робот-рыба
Учёные создали роботов, которые по аналогии с рыбами могут децентрализовано автономно работать.
Стаи рыб показывают сложное синхронизированное поведение: оно помогает им находить пищу, мигрировать и уклоняться от хищников. Никто конкретный не координирует эти движения, и рыбы не сообщают друг другу, что делать дальше. Это поведение возникает в результате так называемой неявной координации, когда отдельные рыбы принимают решения, основываясь на том, что они видят и что делают их соседи.
Этот тип децентрализованной, автономной самоорганизации и координации давно привлекает учёных: его решили использовать в робототехнике. Команда исследователей из Гарвардской школы инженерии и прикладных наук им. Джона А. Полсона (SEAS) и Института биологической инженерии Висса разработала роботов, вдохновленных рыбами, которые могут синхронизировать свои движения.
«Роботы часто работают в местах, которые недоступны или опасны для людей, а также областях, где вмешательство человека может быть даже невозможно. В таких ситуациях действительно нужно иметь высоко автономный рой роботов. Используя набор поведенческие навыков рыб и трёхмерное визуальное восприятие, мы смогли создать систему, которая имеет высокую степень автономности и гибкости под водой. — Флориан Берлингер, доктор философии. Кандидат в SEAS и Wyss и первый автор статьи
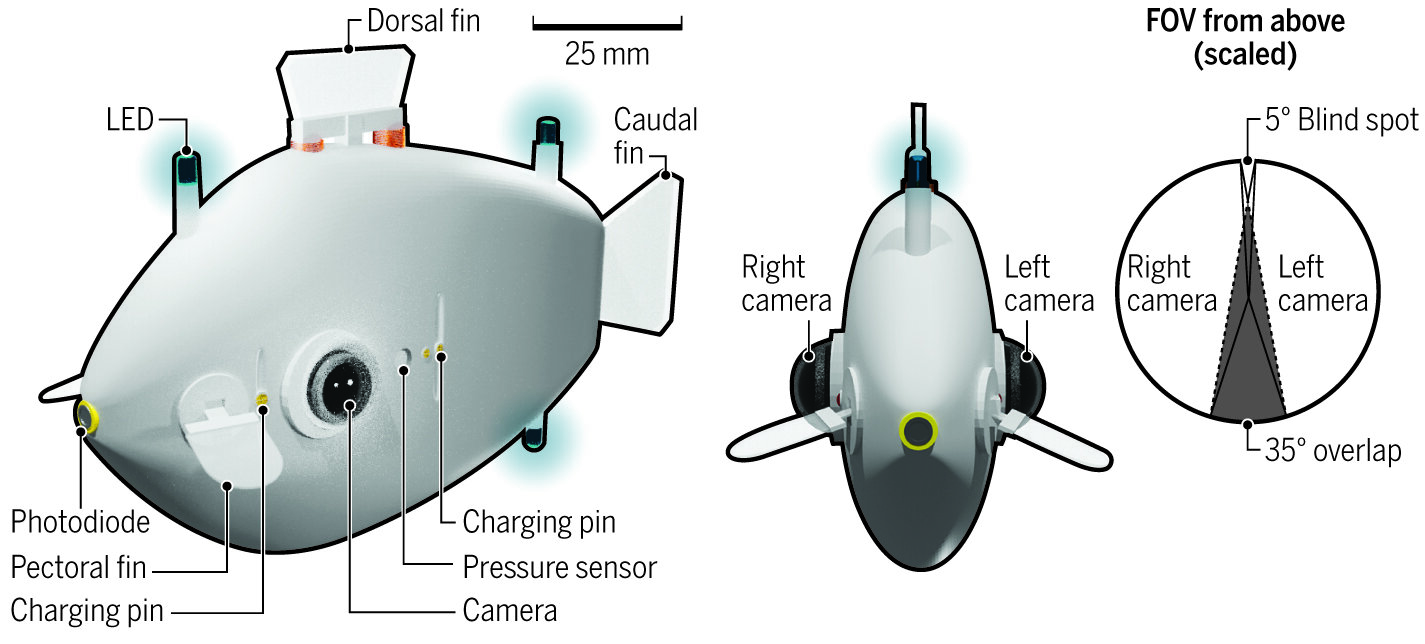
Рой роботов, вдохновленный рыбами, получил название Blueswarm. Исследователи разработали систему координации на основе зрения на базе на синих светодиодов. Каждый подводный робот оснащен двумя камерами и тремя светодиодными лампами. Бортовые камеры обнаруживают светодиоды соседних рыб и используют специальный алгоритм для определения их расстояния, направления и курса.
Так Blueswarm может демонстрировать сложное самоорганизованное поведение: в частности агрегацию, рассеивание и формирование круга.
Источник: Хайтек
 0
0
 0
0
 0
0
 0
0
 0
0


